Inbetriebnahmestrategien
Allgemeines
Dieses Kapitel gibt Ihnen Strategien für die Inbetriebnahme des digitalen
Servoverstärkers und die Optimierung seiner Regelkreise an die Hand.
Diese Strategien können nicht allgemeingültig sein. Abhängig von den Anforderungen
Ihrer Maschine müssen Sie eventuell eine eigene Strategie entwickeln.
Die hier vorgestellten Abläufe helfen Ihnen jedoch, das prinzipielle Vorgehen
zu verstehen.
Parametrierung
|

|
Der Maschinenhersteller muss eine Risikobeurteilung der Maschine erstellen
und ist für die funktionelle, maschinelle und personelle Sicherheit der
Maschine verantwortlich. Dies gilt insbesondere für die Auslösung von Bewegungen
mit Hilfe von Funktionen der Inbetriebnahme-Software.
Die Inbetriebnahme
des Servoantriebes mit Hilfe von Funktionen der Inbetriebnahme-Software
ist nur erlaubt in Verbindung mit einer Zustimmungseinrichtung nach EN
12100, die direkt auf den Antriebskreis wirkt.
|
-
Der Servoverstärker ist montiert und alle erforderlichen elektrischen Verbindungen
sind hergestellt.
-
24V Hilfsversorgung und 208V … 480V Leistungsversorgung sind abgeschaltet.
-
Ein Personal Computer mit installierter Inbetriebnahme-Software ist angeschlossen.
-
Zustimmungseinrichtung nach EN 12100 ist angeschlossen.
-
Die Steuerung gibt für den ENABLE-Eingang des Servoverstärkers ein LOW-Signal
aus, d.h. der Servoverstärker ist disabled.
Hilfsspannung einschalten
|
1.
|
24V Hilfsspannungsversorgung für den Servoverstärker einschalten.
LED-Display : X.XX (Firmware-Version)
BTB-Kontakt : geöffnet
nach ca. 5 Sekunden
:
LED-Display : YY. (Stromstärke, blinkender Punkt für CPU o.k.)
BTB-Kontakt : geschlossen
|
|
2.
|
Personal Computer einschalten
|
|
3.
|
Inbetriebnahme-Software starten
|
|
4.
|
Schnittstelle anklicken (COM1 .... COM10), die zur Kommunikation mit dem
Servoverstärker verwendet wird.
Die Parameter werden zum PC übertragen.
|
|
5.
|
Klicken Sie auf das Kontrollkästchen SW-Disable unten rechts oder drücken
Sie die Funktionstaste F12.
im Statusfeld ACHSE steht nun NO ENABLE
|
Basis-Parametrierung
Der Servoverstärker bleibt weiterhin disabled und die Leistungsversogung
abgeschaltet.
|
1.
|
Basis-Parameter einstellen (Adresse, Ballastangaben, Netzspannung etc.):
-
Klicken Sie auf den Button BASISEINSTELLUNGEN
- Ändern Sie, wenn erforderlich,
die Felder
- Klicken Sie auf ÜBERNEHMEN und anschließend auf OK
|
|
2.
|
Motor wählen :
- Klicken Sie auf den Button MOTOR unter dem Motorbild
- Öffnen
Sie die Motorauswahltabelle, indem Sie auf den Pfeil im Listenfeld
NUMMER-NAME
klicken
- Klicken Sie den angeschlossenen Motor an
- Klicken Sie auf ÜBERNEHMEN
-
Beantworten Sie die Frage nach der Bremse
- Beantworten Sie die Frage nach
"Speichern im EEPROM/Reset" mit NEIN
(die Daten sind im RAM und werden
später dauerhaft gespeichert)
|
|
3.
|
Feedback wählen (Resolver, Encoder) :
- Klicken Sie auf den Button FEEDBACK
-
Die angezeigten Werte entsprechen den Daten des Motor-Default-Datensatzes,
den Sie geladen haben.
- Ändern Sie, wenn erforderlich, die Felder
- Klicken
Sie auf ÜBERNEHMEN und anschließend auf OK
|
|
4.
|
Encoder-Emulation einstellen (ROD, SSI) :
- Klicken Sie auf den Button ROD/SSI/ENCODER
-
Wählen Sie die gewünschte Encoder-Emulation
- Stellen Sie die zugehörigen
Parameter in der rechten Fensterhälfte ein
- Klicken Sie auf OK
|
|
5.
|
Analoge Ein-/Ausgänge konfigurieren :
- Klicken Sie auf den Button I/O ANALOG
-
Wählen Sie die gewünschte SW-FUNKTION
- Stellen Sie für den verwendeten
SW-Eingang die Skalierung bezogen auf 10V ein.
- Stellen Sie gewünschten
Ausgangssignale für MONITOR1 und MONITOR2 ein
- Klicken Sie auf OK
|
|
6.
|
Digitale Ein-/Ausgänge konfigurieren :
- Klicken Sie auf den Button I/O
DIGITAL
- Ordnen Sie den digitalen Eingängen (linke Fensterhälfte) die gewünschten
Funktionen zu und geben Sie, wenn erforderlich, die Hilfsvariable X ein.
-
Ordnen Sie den digitalen Ausgängen (rechte Fensterhälfte) die gewünschten
Funktionen zu und geben Sie, wenn erforderlich, die Hilfsvariable X ein.
-
Klicken Sie auf OK
|
|
7.
|
Parameter speichern :
- Klicken Sie auf den Button
- Beantworten Sie die
Frage nach RESET VERSTÄRKER mit JA
|
|
8.
|
Klicken Sie auf das Kontrollkästchen SW-Disable unten rechts oder drücken
Sie die Funktionstaste F12.
im Statusfeld ACHSE steht nun NO ENABLE
|
Wenn Sie die Lageregelung des Servoverstärkers nutzen wollen, müssen Sie
die für Ihren Antrieb spezifischen Parameter eingeben:
|
1.
|
Achsentyp :
- Klicken Sie auf den Button LAGEREGLER
- Klicken Sie auf den Button POSITIONIERDATEN
-
Wählen Sie den Achsentyp (linear, rund oder modulo)
|
|
2.
|
Bei Achsentyp MODULO: Geben Sie die Parameter Modulo-Start-Pos. und Modulo-End-Pos.
ein.
|
|
3.
|
Auflösung :
- Geben Sie Nenner und Zähler der Auflösung ein. Hierbei passen
Sie den
Verfahrweg der Last in Positioniereinheiten (Längeneinheit bei
Linearachsen bzw.
°mech. bei Rundachsen) an die Anzahl der Motorumdrehungen
an.
Nur ganzzahlige Eingaben sind zugelassen.
Beispiel 1: Übersetzung
= 3,333 mm / Umdrehung
=> Auflösung = 10000/3 µm/Umdr. (alle weiteren Wegeingaben
in µm)
oder
=> Auflösung = 10/3 mm/Umdr. (alle weiteren Wegeingaben in mm)
Beispiel 2: Übersetzung = 180 °mech./Umdr.
=> Auflösung = 180/1 °mech./Umdr.(alle
weiteren Wegeingaben in °mech)
|
|
4.
|
vmax :
- Geben Sie die aus der Auflösung bei Nenndrehzahl des Motors resultierende
maximale Verfahr-Geschwindigkeit der Last ein. Die Maßeinheit ergibt sich
aus der
Auflösung (°mech./s oder Längeneinheit/s).
Beispiel 1: Auflösung
= 10000/3 µm/Umdr. , nnenn = 3000 Umdr./min
=> vmax = Auflösung * nnenn
= 10000/3 * 3000 µm/min = 10 000 000 µm/min
oder
=> vmax = Auflösung * nnenn
= 10/3 * 3000 mm/min = 10 000 mm/min
Beispiel 2: Auflösung = 180 °mech/Umdr.
, nnenn = 3000 Umdr./min
=> vmax = Auflösung * nnenn = 180 * 3000 °mech/min
= 9000 °mech/s
|
|
5.
|
t beschl. min :
- Geben Sie die Zeit in ms ein, die der Antrieb bei der
mechanisch zulässigen
maximalen Beschleunigung braucht, um von Geschwindigkeit
0 auf vmax zu
beschleunigen.
|
|
6.
|
InPosition :
- Geben Sie das InPositions-Fenster ein. Dieser Wert wird für
die InPositions-Meldung
verwendet. Die Maßeinheit ergibt sich aus der
Auflösung (°mech. oder
Längeneinheit).
Typischer Wert : z.B. ca. Auflösung
* 1/100Umdr.
|
|
7.
|
max. Schleppfehler :
- Geben Sie das Schleppfehlerfenster ein. Dieser Wert
wird für die Meldung
SCHLEPPFEHLER verwendet. Die Maßeinheit ergibt sich
aus der Auflösung
(°mech. oder Längeneinheit).
Typischer Wert : z.B. ca.
Auflösung * 1/10Umdr.
|
|
8.
|
Parameter speichern :
- Klicken Sie auf den Button
- Beantworten Sie die
Frage nach RESET VERSTÄRKER mit JA
|
Optimieren der Regelkreise
Die Basisparametrierung muss abgeschlossen sein.
Vorbereitung
|
1.
|
OPMODE :
Stellen Sie den OPMODE "1,Drehzahl analog" ein (Bildschirmseite
VERST�RKER)
|
|
2.
|
SW-Funktion :
Stellen Sie die analoge I/O-Funktion "0,Xsoll=An In 1" ein
Bildschirmseite I/O ANALOG)
|
|
3.
|
Parameter speichern :
- Klicken Sie auf den Button (Bildschirmseite VERST�RKER)
(Bildschirmseite VERST�RKER)
- Beantworten
Sie die Frage nach RESET VERSTÄRKER mit JA
|
|
4.
|
Analog-In1 :
Schließen Sie den Sollwerteingang 1 kurz oder geben Sie 0V
vor
|
|
5.
|
OSZILLOSKOP :
Kanal1 : n_ist Kanal2 : I_ist (Bildschirmseite OSZILLOSKOP)
|
|
6.
|
Reversierbetrieb :
Stellen Sie auf der Bildschirmseite OSZILLOSKOP/SERVICE/PARAMETER
die Parameter für den Reversierbetrieb auf Werte ein, die für Ihre Maschine
auch bei abgeschaltetem Positionsregelkreis ungefährlich sind (ca. 10%
der Enddrehzahl).
|
|

|
Bei der Servicefunktion "Reversierbetrieb" wird der analoge Sollwerteingang
abgeschaltet bzw. der interne Lageregler außer Funktion gesetzt.
Stellen Sie sicher, dass die Alleinfahrt der ausgewählten Achse gefahrlos
möglich ist. Bedienen Sie das ENABLE-Signal des Verstärkers zur Sicherheit
mit einem Zustimmungstaster und stellen Sie die NOT-AUS-Funktion für diese
Achse sicher.
|
Optimieren des Stromreglers
Bildschirmseite STROMREGLER
|
1.
|
Bei passender Verstärker-Motor-Kombination ist der Stromregler bereits
für fast alle Anwendungen stabil eingestellt.
|
|
2.
|
Ipeak :
- Reduzieren Sie Ipeak auf Inenn des Motors (Schutz des Motors)
|
|
3.
|
Leistungsversorgung einschalten.
|
|
4.
|
Analogen Sollwert vorgeben :
- Analog-In 1 = 0V
|
|
5.
|
Enablen Sie nun den Verstärker :
- High-Signal an Enable-Eingang. Im Statusfeld
ACHSE steht nun NO SW-EN
- das Kontrollkästchen SW-Enable anklicken. Im
Statusfeld ACHSE steht nun ENABLE
Der Motor steht nun drehzahlgeregelt mit
n=0 min-1 .Sollte der Stromregler nicht stabil arbeiten (Motor schwingt
mit deutlich höherer Frequenz als 100Hz) setzen Sie sich mit unserer Applikationsabteilung
in Verbindung.
|
Optimieren des Drehzahlreglers
Bildschirmseite DREHZAHLREGLER
|
1.
|
SW-OFFSET:
Lassen Sie den Verstärker enabled. Falls die Achse driftet, verändern
Sie den Parameter SW-Offset solange, bis sie stillsteht (oder verwenden Sie die
Funktion AUTO-OFFSET).
|
|
2.
|
SW-RAMPE +/-:
Die Sollwertrampen werden verwendet, um die Sollwertvorgabe zu glätten (Filterwirkung).
Stellen Sie die mechanische Zeitkonstante des Gesamtsystems, d.h. die Anstiegszeit
bzw. Rampensteigung der Drehzahl von 0 bis nsoll ein.
Solange die eingestellten
Rampen kleiner sind als die mechanische Reaktionszeit des Gesamtsystems,
wird die Reaktionsgeschwindigkeit nicht beeinflusst.
|
|
3.
|
ENDDREHZAHL:
Stellen Sie die gewünschte Enddrehzahl ein.
|
|
4.
|
KP/Tn :
Vergrössern Sie KP bis der Motor zu schwingen beginnt (sichtbar
am Oszilloskop und hörbar) und verkleinern Sie KP wieder, bis die Schwingung
sicher aussetzt und die Stabilität gewährleistet ist.
Für Tn benutzen Sie
den motorbezogenen Defaultwert.
|
|
5.
|
Reversierbetrieb starten :
Starten Sie den Reversierbetrieb (F8, v1/v2 ca. +/-10% von nnenn
des Motors).
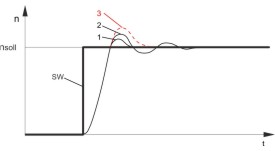
Beobachten Sie den Verlauf der Drehzahl am Oszilloskop. Bei
richtiger Einstellung muss sich eine stabile Sprungantwort in beiden Richtungen
ergeben.
|
|
|
|
Bild : Sprungantwort
n = Drehzahl
SW = Sollwert
t = Zeit
1 = Optimum
2 = KP
zu hoch
|
|
6.
|
KP :
Durch vorsichtiges Vergrössern von KP können Sie den Drehzahlverlauf
feinoptimieren. Ziel: geringstes Überschwingen bei noch guter Dämpfung.
Grössere
Gesamtträgheitsmomente ermöglichen grössere KP.
|
|
7.
|
PID-T2 :
Störeinflüsse wie geringes Getriebespiel o.ä. können Sie dämpfen,
indem Sie PID-T2 bis auf etwa 1/3 des Wertes von Tn erhöhen.
|
|
8.
|
T-TACHO :
Besonders bei kleinen Antrieben mit geringem Drehmoment können
Sie nun mit
T-Tacho die Laufruhe weiter verbessern.
|
|
9.
|
Reversierbetrieb beenden :
Beenden Sie den Reversierbetrieb (F9).
|
Stellen Sie wieder den korrekten, motorbezogenen Wert für Ipeak (Stromregler)
ein. Starten Sie den Reversierbetrieb erneut und beobachten Sie die Sprungantwort.
Reduzieren Sie bei Schwingneigung KP des Stromreglers leicht.
Speichern Sie den aktuellen Parametersatz im EEPROM. Klicken Sie auf den
Button
Optimieren des Lagereglers
Bildschirmseite LAGEREGLER
Vorbereitung
|
1.
|
OPMODE :
Wählen Sie OPMODE 8 (Bildschirmseite VERST�RKER)
|
|
2.
|
Last in Mittelstellung positionieren :
Ziel ist, die Last mit der Funktion
KONSTANTE GESCHWINDIGKEIT etwa in die Mitte des Verfahrweges zu verfahren.
-
Klicken Sie auf den Button LAGEREGLER
- Klicken Sie auf den Button EINRICHTBETRIEB
- Prüfen Sie, ob
der Parameter v (KONSTANTE GESCHWINDIGKEIT) auf 1/10 der
eingestellten
Geschwindigkeitsgrenze vmax eingestellt ist. Ändern Sie den Wert
gegebenenfalls
ein und klicken Sie auf ÜBERNEHMEN.
- Starten Sie die Funktion KONSTANTE
GESCHWINDIGKEIT mit Funktionstaste F4.
Fahren Sie die Last mit F4 nun
etwa in die Mitte des Verfahrweges.
ACHTUNG:
Fährt der Antrieb in die
falsche Richtung, lassen Sie die Funktionstaste F4
los und ändern das
Vorzeichen des Parameters v. Klicken Sie auf ÜBERNEHMEN
und fahren Sie
mit F4 die Last etwa in Mittelposition.
|
|
3.
|
Referenzpunkt setzen :
- Stellen Sie die Referenzfahrtart auf "0,Referenzpunkt setzen" aktiv.
Starten Sie die Referenzfahrt. Die aktuelle Position wird als Referenzpunkt
gesetzt.
- Stoppen Sie die Referenzfahrt
- Klicken Sie auf den Kontrollkästchen
SW-Disable im Verstärkerfenster
|
|
4.
|
Test-Fahrsätze definieren :
- Klicken Sie auf den Button LAGEREGLER
- Klicken Sie auf
den Button POSITIONIERDATEN
- Klicken Sie auf den Button FAHRAUFTRAGSTABELLE und wählen Sie Auftrag 1. Geben
Sie die Werte der Tabelle unten ein, wählen Sie danach Auftrag 2 und geben
Sie
die entsprechenden Werte ein.
|
|
|
|
Auftrag 1
|
Auftrag 2
|
|
Allg.Einheiten
Art
s_soll
v_soll_Quelle
v_soll
t_beschl_ges
t_brems_ges
Rampe
Folgeauftrag
Folge
Nr
Beschl./Bremsen
Starten über
Übernehmen/OK
|
SI
REL soll
+10% des Gesamtverfahrwegs
digital
10% von vmax
10 * t_beschl_min
10
* t_beschl_min
Trapez
mit
2
bis Zielpunkt
sofort
Klicken
|
SI
REL soll
-10% des Gesamtverfahrwegs
digital
10% von vmax
10 * t_beschl_min
bzw. amax / 10
10 * t_beschl_min bzw. amax / 10
Trapez
mit
1
bis Zielpunkt
sofort
Klicken
|
|
5.
|
Parameter speichern :
- Klicken Sie auf den Button
- Beantworten Sie die
Frage nach RESET VERSTÄRKER mit JA
|
Optimierung
|

|
Das Starten von Fahraufträgen mit Hilfe von Funktionen der Inbetriebnahme-Software
ist nur erlaubt in Verbindung mit einer Zustimmungseinrichtung nach EN12100,
die direkt auf den Antriebskreis wirkt.
|
|
1.
|
Fahrauftrag starten :
- Klicken Sie auf den Button LAGEREGLER
- Wählen Sie auf der
Seite POSITIONIERDATEN Fahrauftrag 1, klicken Sie auf START, Fahrauftrag 1 wird gestartet
und durch die Definition der Fahrauftragsfolge fährt der Antrieb in einem
lagegeregelten Reversierbetrieb.
|
|
2.
|
Parameter optimieren (klicken Sie auf den Button POSITIONIERDATEN)
|
|
3.
|
PID-T2, T-Tacho :
In den OPMODES 4, 5 und 8 wird der Drehzahlregler nicht
benutzt. Der Lageregler besitzt einen integrierten eigenen Drehzahlregler,
der jedoch die eingestellten Parameter PID-T2 und T-TACHO der Bildschirmseite
"DREHZAHLREGLER" übernimmt.
|
|
4.
|
KP, Tn :
Wenn KP zu klein eingestellt ist, neigt der Lageregler zum Schwingen.
Übernehmen Sie für KP den Wert des optimierten Drehzahlreglers. Tn sollte
2...3 mal so groß sein wie der Wert für Tn im optimierten Drehzahlregler.
|
|
5.
|
KV :
Das Beschleunigungsverhalten des Motors sollte gut gedämpft (keine
Schwingneigung) bei minimalem Schleppfehler sein. Beim Vergrössern von
KV steigt die Schwingneigung, beim Verkleinern vergrössert sich der Schleppfehler,
der Antrieb wird zu weich. Verändern Sie KV solange, bis das gewünschte
Verhalten erreicht ist.
|
|
6.
|
FF :
Der Integralanteil der Regelung liegt im Lageregler, nicht im Drehzahlregler.
Daher entsteht bei konstanter Drehzahl kein Schleppfehler (reine Proportionalregelung).
Der entstehende Schleppfehler beim Beschleunigen wird beeinflusst durch
den Parameter FF. Der Schleppfehler bei Beschleunigung wird geringer bei
Vergrösserung des Parameters FF. Wenn die Vergrösserung von FF keine Verbesserung
bringt, können Sie KP etwas erhöhen, um die Drehzahlregelung härter zu
machen.
|
Wenn der Antrieb lagegeregelt nicht zufriedenstellend läuft, suchen Sie
zunächst nach äußeren Ursachen wie z.B. :
-
mechanisches Spiel in der Übertragung (begrenzt KP)
-
Klemm- oder Slip-Stick-Effekten
-
zu kleine Eigenfrequenz des mechanischen Systems
-
schlechte Dämpfung, zu schwache Antriebsauslegung
bevor Sie die Regelkreise erneut optimieren.