Bildschirmseite "Positionierdaten"
Für die einzelnen Positionieraufgaben müssen Sie Fahraufträge definieren.
Diese Fahraufträge sind über eine Fahrauftragsnummer anwählbar und im Servoverstärker
gespeichert.
|
Fahrauftrag
|
Speicherort
|
Voraussetzung
|
Bemerkung
|
|
1...180
|
EEPROM
|
Endstufe disabled
|
permanent gespeichert
|
|
192...255
|
RAM
|
keine
|
flüchtig
|
Beim Einschalten des Servoverstärkers werden die RAM-Fahrsätze 192...255
mit den Parametern der EEPROM-Fahrsätze 1...64 automatisch vorbelegt.
Nummer
Eingabe einer Fahrauftragsnummer zum Starten des Fahrauftrages über den
PC.
Fahrauftragstabelle
Es öffnet sich ein neues Fenster, in dem alle Fahraufträge in Tabellenform
dargestellt werden.
Alle Fahrauftragsparameter lassen sich über die Tabelle direkt eingeben.
Für die Bearbeitung stehen folgende Operationen zur Verfügung:
-
Ausschneiden
-
Kopieren
-
Einfügen
-
Löschen
Die Zwischenablage-Operationen Ausschneiden, Kopieren und Einfügen sind
nur zeilenweise möglich, d.h. für diese Operationen muss die entsprechende
Zeile markiert sein. Das Löschen ist sowohl, zeilen- als auch zellenweise
möglich. Eine Zeile kann entweder durch einen Mausklick auf die Zeilennummer
markiert werden, oder aber durch die Tastenkombination <Shitft>+<Space>
(analog zu Microsoft Excel).
Alle Edit-Operationen erfolgen über die jeweiligen
Windows-Standard-Tastenkombinationen.
Eingabe über die Bildschirmseite “Parameter Fahrauftrag”:
Ein Doppelklick auf eine Zeilennummer in der Tabelle öffnet die Bildschirmseite
für den zugehörigen Fahrauftrag.
Die Verwendung des Dialogs “Parameter Fahrauftrags”
hat sich gegenüber älteren Versionen der Software nur dahingehend geändert,
dass die Buttons “OK”, “Übernehmen” und “Löschen” keine Schreibzugriffe
auf das Flash-EEPROM mehr zur Folge haben. Es werden lediglich die entsprechenden
Einträge in der Fahrauftragstabelle aktualisiert! Um Änderungen an den
Fahraufträgen in den Regler zu schreiben, sind die Buttons “OK” oder “Übernehmen”
auf der Seite “Fahrauftragstabelle” zu betätigen.
Start
|
ASCII : MOVE
|
Default : -
|
gültig für OPMODE 8
|
Starten des Fahrauftrags, dessen Nummer im Feld NUMMER sichtbar ist. Verstärker
muss enabled sein .
|

|
Beim Start des Fahrsatzes wird der SW-Enable automatisch gesetzt. Der Fahrsatz
wird nur gestartet bei OPMODE8. Der SW-Enable wird jedoch bei allen OPMODES
gesetzt. Daher kann der Antrieb mit einem anliegenden analogen Sollwert
beschleunigen, wenn bei OPMODES1 oder 3 der START Befehl ausgeführt wird.
Der
Fahrsatz wird nicht gestartet, wenn die Zielposition außerhalb der definierten
SW-Endschalter liegt (Warnmeldungen n06/n07 und n08)
|
Stop
|
ASCII : STOP
|
Default : -
|
gültig für OPMODE 8
|
Abbruch des aktuellen Fahrauftrages. Der SW-Enable bleibt gesetzt!
Achsentyp
|
ASCII : POSCNFG
|
Default : 0
|
gültig für OPMODE 8
|
Hier wird ausgewählt, ob die Achse als Linear- oder als Rundachse betrieben
werden soll.
v_max
|
ASCII : PVMAX
|
Default : 100
|
gültig für OPMODE 8
|
Mit diesem Parameter wird die maximale Verfahrgeschwindigkeit den Grenzen
der Arbeitsmaschine angepasst. Die obere Einstellgrenze wird abhängig von
der gewählten Enddrehzahl des Antriebs berechnet. Der eingegebene Wert
dient als Grenzwert für die Eingabe "v_soll" in den Fahraufträgen. Bei
der Inbetriebnahme können Sie mit v_max (ohne die Einstellung der Fahrsätze
zu verändern) die Geschwindigkeit begrenzen. Ein kleinerer Wert von v_max
übersteuert v_soll der Fahraufträge.
t_beschl_min
|
ASCII : PTMIN
|
Default : 1 ms
|
gültig für OPMODE 8
|
Ein Antrieb wird immer so ausgelegt werden, dass er mehr Leistung abgeben
kann als es die Anwendung erfordert. Mit diesem Parameter legt man den
Grenzwert für die maximale, mechanische Beschleunigung auf v_max fest,
die der Antrieb nicht überschreiten darf. Dieser Wert gilt gleichzeitig
als minimaler Grenzwert für die Eingaben "t_beschl_ges" (Beschleunigung
von 0 auf v_soll) und "t_brems_ges" (negative Beschleunigung von v_soll
auf 0) der Fahraufträge.
Je nach Einstellung von Einheiten Beschl. kann man entweder die
Beschleunigungszeit oder die Beschleunigung in der eingestellten Einheit
angeben.
InPosition
|
ASCII : PEINPOS
|
Default : 4000
|
gültig für OPMODES 4,5,8
|
Stellt das In Positions-Fenster ein. Legt fest, ab welcher Entfernung von
der Sollposition die Meldung "In Position" ausgegeben werden soll. Der
Antrieb fährt genau in den Zielpunkt.
Modulo-Start-Pos.
|
ASCII : SRND
|
Default : -231
|
gültig für OPMODES 4,5,8
|
Mit diesem Parameter wird der Anfang des Verfahrbereiches für eine Modulo-Achse
festgelegt. Das Ende des Bereiches wird mit dem Kommando Modulo-End-Pos.
eingestellt.
Modulo-End-Pos.
|
ASCII : ERND
|
Default : 231-1
|
gültig für OPMODES 4,5,8
|
Mit diesem Parameter wird das Ende des Verfahrbereiches für eine Modulo-Achse
festgelegt. Der Anfang des Bereiches wird mit dem Kommando Modulo-Start-Pos.
eingestellt.
Positionsregister
Programmierbare Register, die verschiedenen Funktionen zugeordnet werden
können.
Änderung nur bei disabletem Verstärker + Reset.
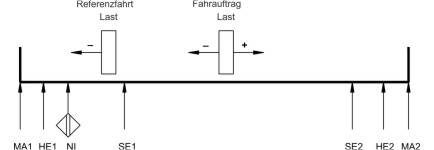
SW-Endschalter 1 / 2
Die Software-Endschalter gehören zu den Überwachungsfunktionen des Lagereglers.
|
SW-Endschalter 1
|
Es wird überwacht , ob die aktuelle Position kleiner als der eingestellte
Wert ist (die negative Drehrichtung ist nun gesperrt, Sie müssen in positiver
Drehrichtung aus dem SW-Endschalter 1 herausfahren).
|
|
SW-Endschalter 2
|
Es wird überwacht , ob die aktuelle Position größer als der eingestellte
Wert ist (die positive Drehrichtung ist nun gesperrt, Sie müssen in negativer
Drehrichtung aus dem SW-Endschalter 2 herausfahren.).
|
Der Antrieb bremst mit der Not-Rampe und bleibt kraftschlüssig stehen.
Die
prinzipielle Position der Software-Endschalter sehen Sie in der Abbildung
unten:
|
|
Legende
MA1 : Maschinenanschlag links
HE1 : Hardware-Endschalter links
NI : Nullpunkt-Initiator
(Referenz)
SE1 : Software-Endschalter 1
SE2 : Software-Endschalter 2
HE2 : Hardware-Endschalter
rechts
MA2 : Maschinenanschlag rechts
+ : Zählrichtung positiv
- : Zählrichtung
negativ
|
|
ASCII : SWCNFG (setzen, Bitvariable)
|
Default : 0
|
gültig für alle OPMODES
|
|
ASCII: (Position)
SWE1, SWE2, SWE3, SWE4, SWE5
|
Default : 0
|
gültig für alle OPMODES
|
Konfigurationsvariablen für die Positionsregister. SWCNFG ist eine binär
kodierte Bit-Variable und wird als Dezimalzahl im ASCII-Terminalprogramm
übergeben.
Auflösung
|
ASCII: PGEARI (Zähler)
|
Default : 10000
|
gültig für OPMODE 8
|
|
ASCII: PGEARO (Nenner)
|
Default : 1
|
gültig für OPMODE 8
|
Eingabe der Auflösung für die Fahrsätze in µm/Umdrehung. Durch die Zähler/Nenner-Eingabe
können beliebige Auflösungen definiert werden.
Änderung nur bei disabletem
Verstärker + Reset.
Beispiele:
- Die Eingabe 10000/1 ergibt eine Auflösung
von 10 mm/Umdrehung
- Die Eingabe 10000/3 ergibt eine Auflösung von 3,333
mm/Umdrehung
- Rundtisch mit Getriebemotor, i = 31 (31 Motorumdrehungen
pro Tischumdrehung)
- Die Eingabe 360/31 ergibt rundungsfreien Betrieb für
Positionseingaben in Grad
Der maximale Verfahrbereich ist auf +/- 2047 Motorumdrehungen begrenzt.
Falls eine höhere Anzahl (+/- 32767) gewünscht ist, bitten wir um Rücksprache
mit unserer Applikationsabteilung.
GMT
Aufruf des Graphical Motion Tasking
Graphical Motion Tasking ist ein fortschrittliches
Feature, das Ihnen die Programmierung von Fahraufträgen über seine grafische
Oberfläche vereinfacht. Sie können mehrfache Bewegungen steuern, Ein- und
Ausgänge verarbeiten, Verzweigungen einfügen, Zeitverzögerungen definieren
und Parameter anpassen. Das Oberfläche ist einfach zu verwenden und erlaubt
Ihnen, in einem intuitiven Flussdiagramm zu programmieren. Fahraufträge
werden durch den Servoverstärker seit der Produkteinführung 1998 unterstützt.
In seiner ursprünglichen Form unterstützten die Fahraufträge nur verkettete
Bewegungen in einem festgelegten Ablauf oder als Endlosschleifen. Graphical
Motion Tasking erweitert die Möglichkeiten von Fahraufträgen, indem es
begrenzte Wiederholungen, das Vergleichen (<, =, >, etc.), das Benennen
von von Funktionen und die Einstellung von von Prozessvariablen ermöglicht.