Bildschirmseite "Einrichtbetrieb"
Die Referenzfahrt ist ein Absolutauftrag, der der Nullung des Antriebs
für nachfolgende Positionieraufgaben dient. Sie können verschiedene Arten
von Referenzfahrten auswählen.
Nach der Referenzfahrt meldet der Antrieb "InPosition" und gibt damit den
Lageregler im Servoverstärker frei.
|

|
Sorgen Sie dafür, dass die Lage des Maschinennullpunktes (Referenzpunkt)
die nachfolgenden Positioniervorgänge zulässt. Die parametrierten Software-Endschalter
sind eventuell unwirksam. Die Achse fährt eventuell auf den Hardware-Endschalter
bzw. auf den mechanischen Anschlag. Es besteht die Gefahr von Beschädigungen.
|
|
|
Wird der Referenzpunkt (Maschinennullpunkt) z.B. bei hohen Massenträgkeitsmomenten
mit zu hoher Geschwindigkeit angefahren, kann er überfahren werden und
die Achse fährt in ungünstigen Fällen auf den Hardware-Endschalter bzw.
auf den mechanischen Anschlag. Es besteht die Gefahr von Beschädigungen.
|
|
|
Ohne vorherige Referenzfahrt kann der Lageregler nicht betrieben werden.
Nach
Zuschalten der 24V-Hilfsspannung muss zunächst eine Referenzfahrt durchgeführt
werden.
Während der Referenzfahrt darf das Start-Signal nicht weggenommen
werden.
Das Start-Signal muss solange anstehen, bis die "InPosition"-Meldung
erscheint.
|
|
|
Beim Starten der Referenzfahrt wird der SW-Enable automatisch gesetzt.
Referenzfahrten werden nur in OPMODE 8 gestartet. Der SW-Enable wird jedoch
in allen OPMODES gesetzt. Deshalb kann der Antrieb durch einen anliegenden
analogen Sollwert beschleunigen, wenn das START-Kommando in OPMODE 1 oder
OPMODE 3 ausgeführt wird.
|
Start
|
ASCII : MH
|
Default : -
|
Gültig für OPMODE 8
|
Kontrollkästchen zum Starten der Referenzfahrt.
Stop
|
ASCII : STOP
|
Default : -
|
Gültig für alle OPMODES
|
Kontrollkästchen zum Anhalten (Abbrechen) der Referenzfahrt. SW-Enable
bleibt gesetzt!
Referenzfahrtarten
|
ASCII : NREF
|
Default : 0
|
gültig für OPMODE 8
|
Sie können wählen, welche Art der Referenzfahrt ausgeführt werden soll.
Ein
eingestellter Nullimpulsoffset (Bildschirmseite "Encoder") wird bei der Positionsausgabe
und -anzeige berücksichtigt. Ausnahme : Referenzfahrt 5 — hier wird die
tatsächliche aktuelle Position angezeigt.
Sie können den Nulldurchgang der
Motorwelle durch den Parameter "Nullimpulsoffset" (Bildschirmseite "Encoder")
beliebig innerhalb einer Umdrehung verschieben.
Nullpunktkennung : Der Referenzpunkt wird auf den ersten Nulldurchgang
der Rückführeinheit (Nullpunkt) nach Erkennung der Referenzschalterflanke
gesetzt. Zweipoliger Resolver und alle Encoder haben genau einen Nulldurchgang
pro Umdrehung, damit ist die Positionierung auf den Nullpunkt innerhalb
einer Motorumdrehung eindeutig. Bei 4-poligen Resolvern gibt es zwei Nulldurchgänge
pro Umdrehung, bei 6-poligen Resolvern drei Nulldurchgänge.
Wenn die Flanke
des Referenzschalters in der Nähe des Nulldurchgangs der Rückführeinheit
liegt, kann die Positionierung auf den Nullpunkt um bis zu eine Motorumdrehung
schwanken.
|

|
Die Wiederholgenauigkeit bei Referenzfahrten ohne Nullpunkterkennung hängt
ab von der Verfahrgeschwindigkeit und von dem mechanischen Aufbau des Referenzschalters
bzw. Endschalters.
|
|
Referenzfahrt 0
|
Setzten des Referenzpunktes auf die aktuelle SOLL-Position (Schleppfehler
geht verloren).
|
|
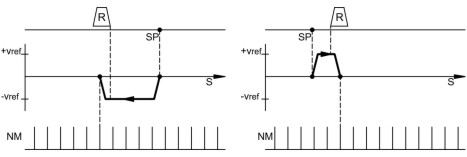
Referenzfahrt 1
|
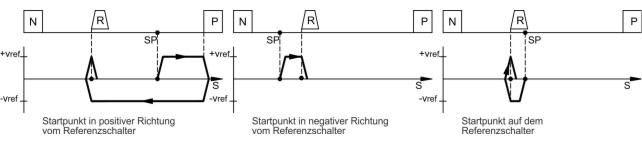
Fahren auf Referenzschalter mit Nullpunkterkennung.
|
Eine Referenzfahrt ist hier auch ohne Hardware-Endschalter möglich. Voraussetzung
hierfür ist eine der unten dargestellten Startsituation:
|
|
Fahrtrichtung negativ,
Drehrichtung positiv
|
Fahrtrichtung negativ,
Drehrichtung negativ
|
|
|
|
|
Referenzfahrt 2
|
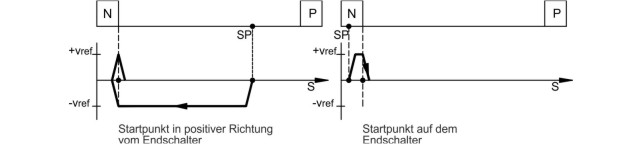
Fahren auf Hardwareendschalter mit Nullpunkterkennung. Der Referenzpunkt
wird auf den ersten Nulldurchgang der Rückführeinheit (Nullpunkt) außerhalb
des Endschalters gesetzt.
|
|
Referenzfahrt 3
|
Fahren auf Referenzschalter ohne Nullpunkterkennung. Der Referenzpunkt
wird auf die Flanke des Referenzschalters gesetzt.
|
|
Referenzfahrt 4
|
Fahren auf Hardwareendschalter ohne Nullpunkterkennung. Der Referenzpunkt
wird auf die Flanke des Hardwareendschalters gesetzt.
|
|
Referenzfahrt 5
|
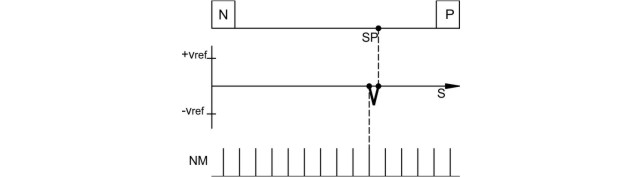
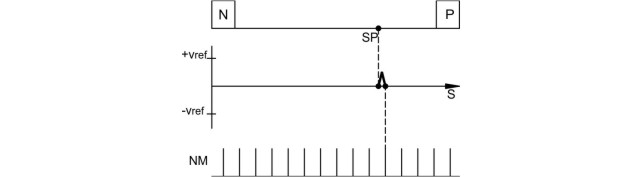
Fahren auf den nächstens Nullpunkt der Rückführeinheit. Der Referenzpunkt
wird auf den nächsten Nullpunkt der Rückführeinheit gesetzt.
|
|
Referenzfahrt 6
|
Setzt den Referenzpunkt auf die Istposition (der Schleppfehler geht nicht
verloren).
|
|
Referenzfahrt 7
|
Fahren auf Hardwareanschlag mit Nullpunkterkennung. Der Referenzpunkt wird
auf den ersten Nulldurchgang der Rückführeinheit (Nullpunkt) außerhalb
des Anschlags gesetzt.
Der Impulsstrom wird mit dem Parameter REF.-IPEAK auf der Bildschirmseite
Stromregler eingestellt.
|
|
Referenzfahrt 8
|
Fahren auf eine absolute SSI-Position. Bei beginn der Referenzfahrt wird
eine Position am SSI-Eingang eingelesen (GEARMODE=7), anhand der Skalierfaktoren
GEARI und GEARO und dem Referenzoffset umgerechnet und als Zielposition
verwendet.
|
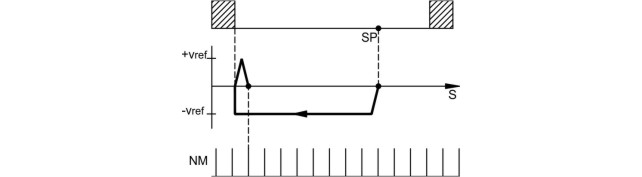
Auf den folgenden Seiten finden Sie für jede mögliche Startsituation die
Verfahrwege während der Referenzfahrtarten 1..5 und 7 (Drehrichtung positiv,
Fahrtrichtung negativ und positiv).
In den Zeichnungen bedeuten:
|
N
|
Endschalter NSTOP
|
P
|
Endschalter PSTOP
|
SP
|
Startposition
|
|
R
|
Referenzschalter
|
vref
|
Sollgeschwindigkeit
|
NM
|
Nullpunkt des Resolvers
|
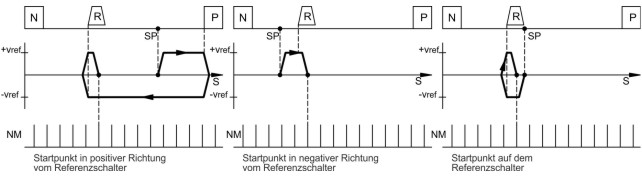
Referenzfahrt 1
|

|
Achtung !
Überprüfen Sie vor dem Start der Referenzfahrt 1 die Sicherheit
der Anlage, da ein Verfahren der Last auch bei nicht angeschlossenen oder
defekten Endschaltern möglich ist.
Um die volle Funktionalität der Referenzfahrt
zu erreichen, müssen die Endschalterfunktionen 2, PSTOP und 3,NSTOP aktiviert werden.
|
Referenzfahrt mit Referenzschalter, Fahrtrichtung negativ, Drehrichtung
positiv, mit Nullpunkt

Referenzfahrt mit Referenzschalter, Fahrtrichtung positiv, Drehrichtung
positiv, mit Nullpunkt
Referenzfahrt 2
|

|
Achtung !
Hardware-Endschalter müssen vorhanden und angeschlossen sein.
Die
Endschalterfunktionen 2, PSTOP und 3,NSTOP müssen eingeschaltet sein.
|
Referenzfahrt ohne Referenzschalter, Fahrtrichtung negativ, Drehrichtung
positiv, mit Nullpunkt
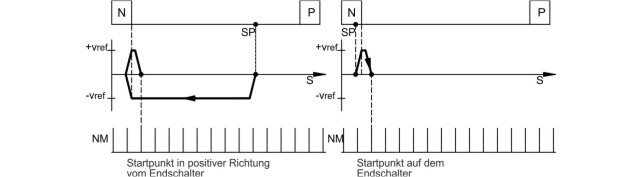
Referenzfahrt ohne Referenzschalter, Fahrtrichtung positiv, Drehrichtung
positiv, mit Nullpunkt

Referenzfahrt 3
|

|
Achtung !
Überprüfen Sie vor dem Start der Referenzfahrt 3 die Sicherheit
der Anlage, da ein Verfahren der Last auch bei nicht angeschlossenen oder
defekten Endschaltern möglich ist.
Um die volle Funktionalität der Referenzfahrt
zu erreichen, müssen die Endschalterfunktionen 2, PSTOP und 3,NSTOP aktiviert werden.
|
Referenzfahrt mit Referenzschalter, Fahrtrichtung negativ, Drehrichtung
positiv, ohne Nullpunkt
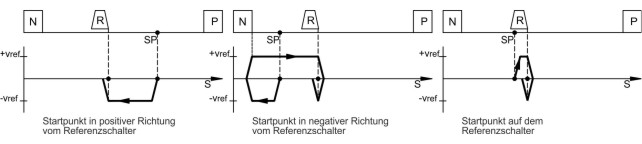
Referenzfahrt mit Referenzschalter, Fahrtrichtung positiv, Drehrichtung
positiv, ohne Nullpunkt
Referenzfahrt 4
|

|
Achtung !
Hardware-Endschalter müssen vorhanden und angeschlossen sein.
Die
Endschalterfunktionen 2, PSTOP und 3,NSTOP müssen eingeschaltet sein.
|
Referenzfahrt ohne Referenzschalter, Fahrtrichtung negativ, Drehrichtung
positiv, ohne Nullpunkt
Referenzfahrt ohne Referenzschalter, Fahrtrichtung positiv, Drehrichtung
positiv, ohne Nullpunkt

Referenzfahrt 5
|

|
Verhalten bei mehrmaligem Start der Referenzfahrt 5 hintereinander:
Der
Lageregler kann den Motor nur in der Nullposition halten, indem er die
Nullpunkt um ± 1 count überfährt. Bei erneutem Start der Referenzfahrt
5 wird je nach Position (1 count vor oder 1 count hinter der Nullpunkt)
und Zählrichtung eventuell eine volle Motorumdrehung gefahren!
|
Referenzfahrt ohne Referenzschalter, Fahrtrichtung negativ, Drehrichtung
positiv, mit Nullpunkt
Referenzfahrt ohne Referenzschalter, Fahrtrichtung positiv, Drehrichtung
positiv, mit Nullpunkt
Referenzfahrt7
|

|
Warnung !
Bei dieser Referenzfahrt kann der Hardwareanschlag der Maschine
mechanisch beschädigt werden. Der Spitzenstrom Ipeak und der Effektivstrom
Irms werden für die Dauer der Referenzfahrt begrenzt.
Eine grössere Strombegrenzung ist möglich(siehe Parameter Ref.-Ipeak).
|
Referenzfahrt auf Hardwareanschlag, Fahrtrichtung negativ, Drehrichtung
positiv, mit Nullpunkt

Referenzfahrt auf Hardwareanschlag, Fahrtrichtung positiv, Drehrichtung
positiv, mit Nullpunkt
Fahrtrichtung
|
ASCII : DREF
|
Default : 0
|
gültig für OPMODE 8
|
Legt die Fahrtrichtung der Referenzfahrt fest. Die Einstellung "entfernungsabhängig"
ist nur relevant für die Referenzfahrt 5 (innerhalb einer Umdrehung). Hier
wird die Richtung entsprechend der kürzesten Entfernung zum Nullpunkt gewählt.
Dieser Parameter gibt auch die Verfahrrichtung bei Achsentyp Modulo vor.
v für Referenzfahrt
|
ASCII : VREF
|
Default : 0
|
gültig für OPMODE 8
|
Legt die Geschwindigkeit für die Referenzfahrt fest. Das Vorzeichen wird
automatisch durch die gewählte Fahrtrichtung bestimmt. Die Dimension ist
über VUNIT festgelegt.
Beschl. Rampe
|
ASCII : ACCR
|
Default : 10 ms
|
gültig für OPMODE 8
|
Beschleunigungszeit für die Referenzfahrt. Die Dimension ist über ACCUNIT festgelegt.
Eingabe z.B. in Millisekunden (1...32767 ms). Die Rampe gilt auch für den
Modus Konstante Geschwindigkeit.
Bremsrampe
|
ASCII : DECR
|
Default : 10 ms
|
gültig für OPMODE 8
|
Bremsrampe für die Referenzfahrt. Die Dimension ist über ACCUNIT festgelegt. Eingabe
z.B. in Millisekunden (1...32767 ms). Die Rampe gilt auch für den Modus
Konstante Geschwindigkeit. Diese Bremsrampe wird nur dann benutzt, wenn
die Betriebsart es zulässt. Bei Referenzfahrten auf einen Hardware-Endschalter
wird die Not-Rampe benutzt.
Referenzoffset
|
ASCII : ROFFS
|
Default : 0
|
gültig für OPMODE 8
|
Mit dem Referenz-Offset können Sie dem Referenzpunkt einen von 0 abweichenden
absoluten Positionswert zuordnen. Physikalisch ändern Sie mit einem Offset
an der Referenzposition nichts, nur innerhalb der Lageregelung des Servoverstärkers
wird mit dem Offset als Bezugswert gerechnet. Eine Homefahrt zum Referenzschalter
endet dann nicht mehr bei Null, sondern bei dem eingestellten Referenz-Offset-Wert.
Der Referenz-Offset muss vor Start der Referenzfahrt gesetzt werden. Die
Dimension ist über PUNIT festgelegt. Eine Änderung des Offsets wird erst wirksam
nach erneuter Referenzfahrt.. Der Parameter "Auflösung" muss für Ihre Anwendung
korrekt eingestellt sein.
Tippbetrieb
Der Modus Tippbetrieb ist als Endlosfahrt mit konstanter Geschwindigkeit
definiert. Diese Betriebsart kann gestartet werden ohne gesetzten Referenzpunkt.
Die Hardware-Endschalter werden überwacht. Software-Endschalter werden
nur überwacht, wenn ein Referenzpunkt gesetzt ist. Beschleunigungs- und
Bremsrampen werden von den Einstellungen für die Referenzfahrt übernommen.
|

|
Beim Start der Funktion "Tippbetrieb" wird der SW-Enable automatisch gesetzt.
Die Funktion "Tippbetrieb" wird nur gestartet bei OPMODE 8. Der SW-Enable
wird jedoch bei allen OPMODES gesetzt. Daher kann der Antrieb mit einem
anliegenden analogen Sollwert beschleunigen, wenn bei OPMODES1 oder 3 der
START Befehl ausgeführt wird.
|
v für Konst. Geschw.
|
ASCII : VJOG
|
Default : 0
|
gültig für OPMODE 8
|
Legt die Geschwindigkeit für den Modus Konstante Geschwindigkeit fest.
Das eingegebene Vorzeichen bestimmt die Fahrtrichtung. Vor Starten des
Modus Konstante Geschwindigkeit muss der Geschwindigkeitswert übernommen
werden. Die Dimension ist über VUNIT festgelegt.
F4
|
ASCII : MJOG
|
Default : -
|
gültig für OPMODE 8
|
Starten des Modus Tippbetrieb durch drücken der Funktionstaste F4. Solange,
wie die Funktionstaste gedrückt bleibt, bewegt sich der Antrieb mit der
voreingestellten Geschwindigkeit in der Richtung, die durch das Vorzeichen
des Parameters "v für Konst. Geschw." festgelegt wurde. Wenn während des
Drückens der Funktionstaste ein Kommunikationsfehler auftritt, wird der
Antrieb nit der Notrampe angehalten.